- Europe
- Amériques
- Asie et Moyen-Orient
- Afrique et Océanie
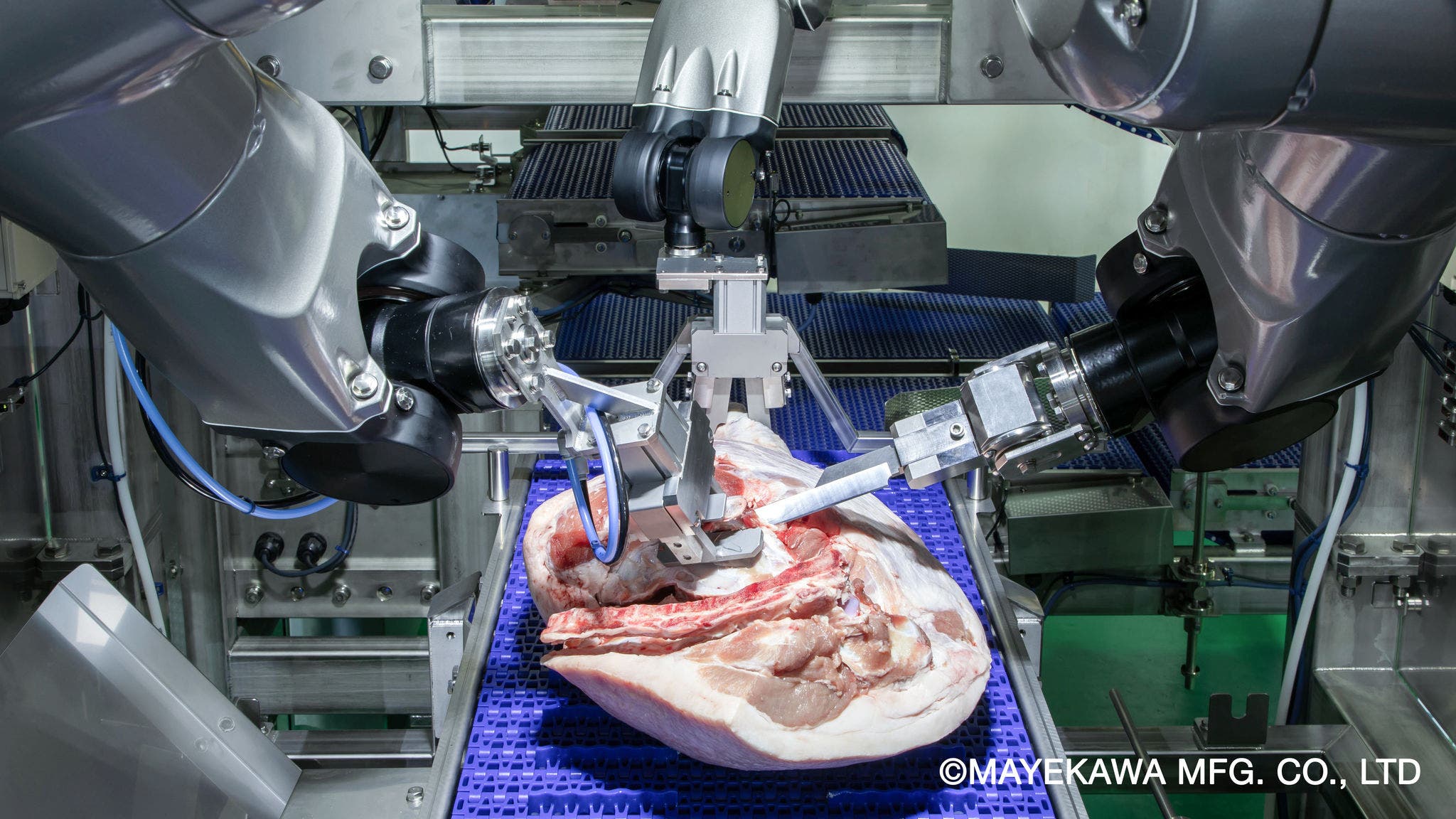
Un nouvel équipement entièrement automatisé nécessite environ quarante secondes pour désosser l'os de la hanche et le coccyx d'une cuisse de porc. Le travail principal est effectué par trois robots Stäubli conformes aux normes d'hygiène. Deux maintiennent la cuisse en place, tandis que le troisième manie le couteau.
Désosser le porc manuellement est l'une des activités les plus exigeantes et les plus pénibles pour la santé. Mais jusqu'à présent, il n'existait pas d'alternative automatisée pour cette tâche complexe. Maintenant, la situation a changé : le constructeur d'équipements japonais Mayekawa a développé une cellule robotique entièrement automatisée qui offre la solution parfaite grâce à la vision par ordinateur et à l'IA.
Alléger le travail humain qui est pénible ou malsain : c'est l'une des missions principales de la robotique. Dans de nombreux domaines d'application, par exemple dans les processus de montage industriel, cela fonctionne bien. Dans d'autres, pas encore aussi bien - par exemple dans les abattoirs. Ici, les conditions environnementales sont défavorables pour le personnel (froid, humidité, grand effort physique nécessaire pour la découpe) et le travail est extrêmement exigeant et hautement répétitif. Jusqu'à présent, il n'était pas possible de l'automatiser : chaque animal est différent, la coordination main-œil du personnel spécialisé était indispensable.
La cellule robotique CELLDAS ouvre ici un nouveau chapitre : Trois robots six axes Stäubli TX2-60 HE et TX2-90 HE sont utilisés. Pendant que deux des robots sont responsables de la manipulation et du positionnement de la viande, le troisième équipé d'un couteau effectue le désossage.
Le robot « sait » exactement où réaliser les coupes et où se trouvent les os. Ce que l'œil humain accomplit lors du dépeçage manuel ainsi que le « retour tactile » lorsque le personnel rencontre une résistance dans la viande, est ici réalisé par une combinaison de traitement d'image et d'intelligence artificielle. Sur le convoyeur menant à la cellule robotique, la pièce de viande à désosser est scannée en 3D et passée aux rayons X.
À partir de l'analyse des scans et images aux rayons X, le contrôle crée un plan pour le dépeçage avec les chemins de coupe optimaux et utilise pour cela l'intelligence artificielle. Elle évalue les données du traitement d'image afin d'optimiser le chemin de coupe. La nouvelle installation entièrement automatisée nécessite environ quarante secondes pour désosser l'os de la hanche et l'os sacral d'une cuisse de porc.
Le fait que les ingénieurs de Mayekawa aient opté pour des robots Stäubli repose essentiellement sur trois raisons : Dans la version HE, les robots sont conçus dès le départ pour fonctionner dans l'humidité et la moiteur. Ainsi, ils résistent sans problème aux cycles de nettoyage intensifs dans l'industrie alimentaire.
Le second grand avantage des robots Stäubli est l'utilisation d'huile compatible avec les aliments de la classe NSF-H1.
La troisième exigence importante découle du fait que les mouvements et les efforts lors du désossage ne sont jamais exactement prévisibles. La lame sur le bras du robot peut rencontrer de manière inattendue des os dans la viande, elle peut être coincée dans l'os et se libérer soudainement. Cela signifie que des moments forts et irréguliers agissent sur la transmission. Les engrenages en particulier doivent pouvoir résister à ces moments. C'est le cas des robots Stäubli, car la technologie d'entraînement JCS développée en interne et brevetée offre des réserves suffisantes dans toutes les situations.
Et : La cellule CELLDAS soulage les bouchers de cette activité épuisante, qui est souvent associée à des maladies professionnelles telles que les tendinites et d'autres problèmes de santé dus au froid et à l'humidité.